![]()
A modular, high‑performance gesture‑based controller written in C++.
It translates hand gestures captured by a camera into control commands for robots or drones, with built‑in support for OPC UA communication and real‑time video processing.
| Drone Software‑in‑the‑Loop Simulation | Delta Robot PLC (OPC UA) |
|---|---|
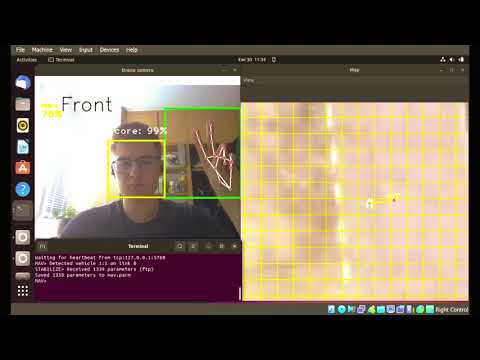 |
 |
- Remappable gesture commands – easily change which gesture triggers which action.
- Multi‑device support – connect to any device that provides a video stream and accepts commands (serial, OPC UA, etc.).
- Resource‑efficient – runs well on constrained hardware (e.g., Raspberry Pi, PLC Companion Computer).
- Face detection – using OpenCV’s Haar cascade to focus the gesture recognition region.
- Gesture detection – ResNet18 model trained on a custom dataset, executed with ONNX Runtime.
- OPC UA integration – read robot status (position, mode, servo OK) and send jog commands to industrial controllers.
- Simulation mode – test the control logic without hardware.
- Asynchronous logging – spdlog provides colour‑coded, thread‑safe logs.
The project is split into several modules:
Controller– gesture/face detection, and command dispatching.GenericDevice– abstract interface for any controllable device (simulated, serial, OPC UA).OPCUA_Device– concrete implementation that talks to an OPC UA server (e.g., a PLC controlling a delta robot).- Face & Gesture detectors – wrappers around OpenCV and ONNX Runtime.
- C++17 compiler (gcc, clang)
- CMake 3.10+
- OpenCV (≥4.5)
- spdlog -logging
- open62541 – OPC UA client
- argparse – command‑line argument parsing
git clone https://github.com/mboiar/gesture_controller.git
cd gesture_controller
mkdir build && cd build
cmake ..
make -j$(nproc)