questions of running launch file #70
Description
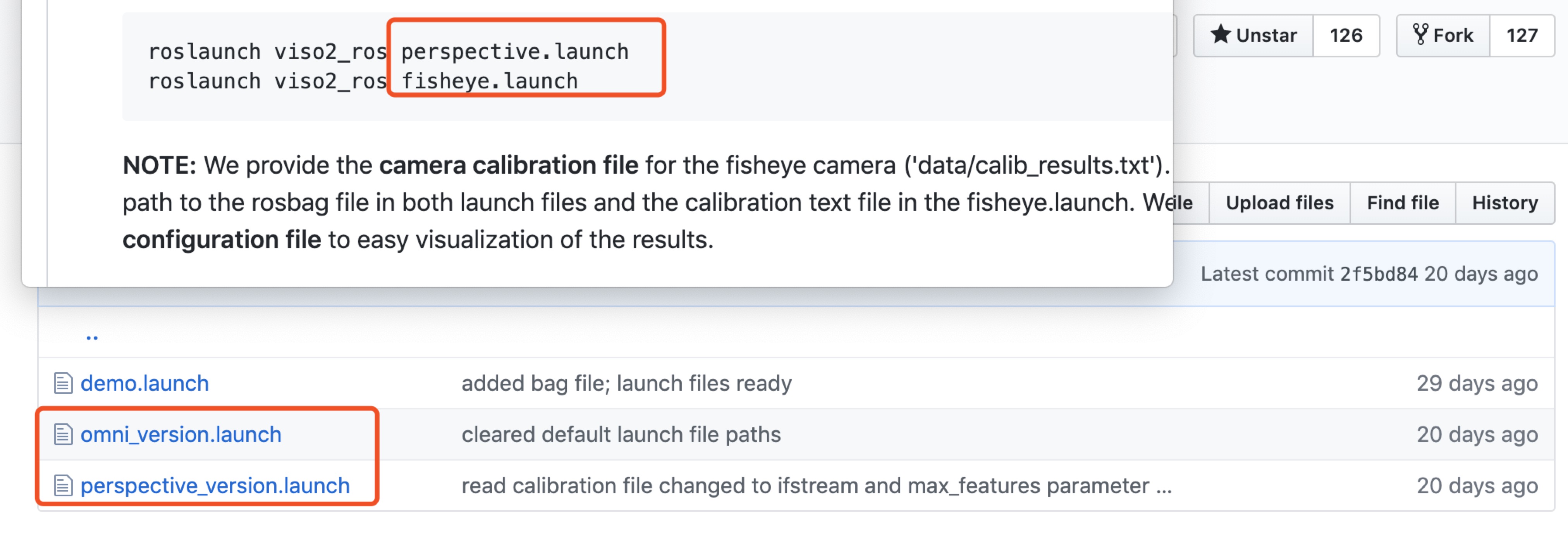
Hi, I think there is a typo in README.md about the launch files name.
Besides, I have two questions as below and look forward your great help.
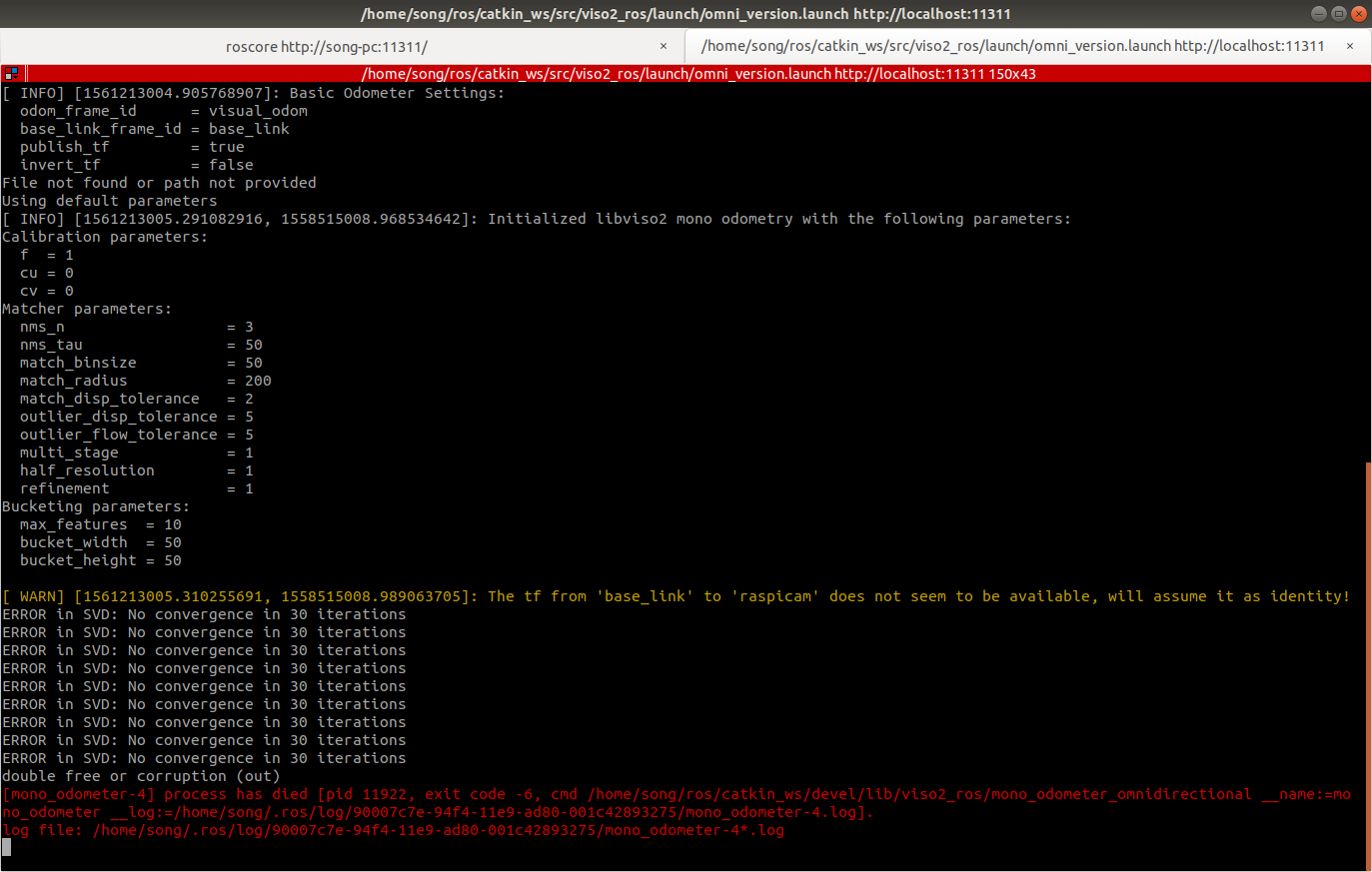
Question 1: when I used performance_test.bag and ran "roslaunch viso2_ros omni_version.launch", process died and feedback "ERROR in SVD: No convergence in 30 iterations".
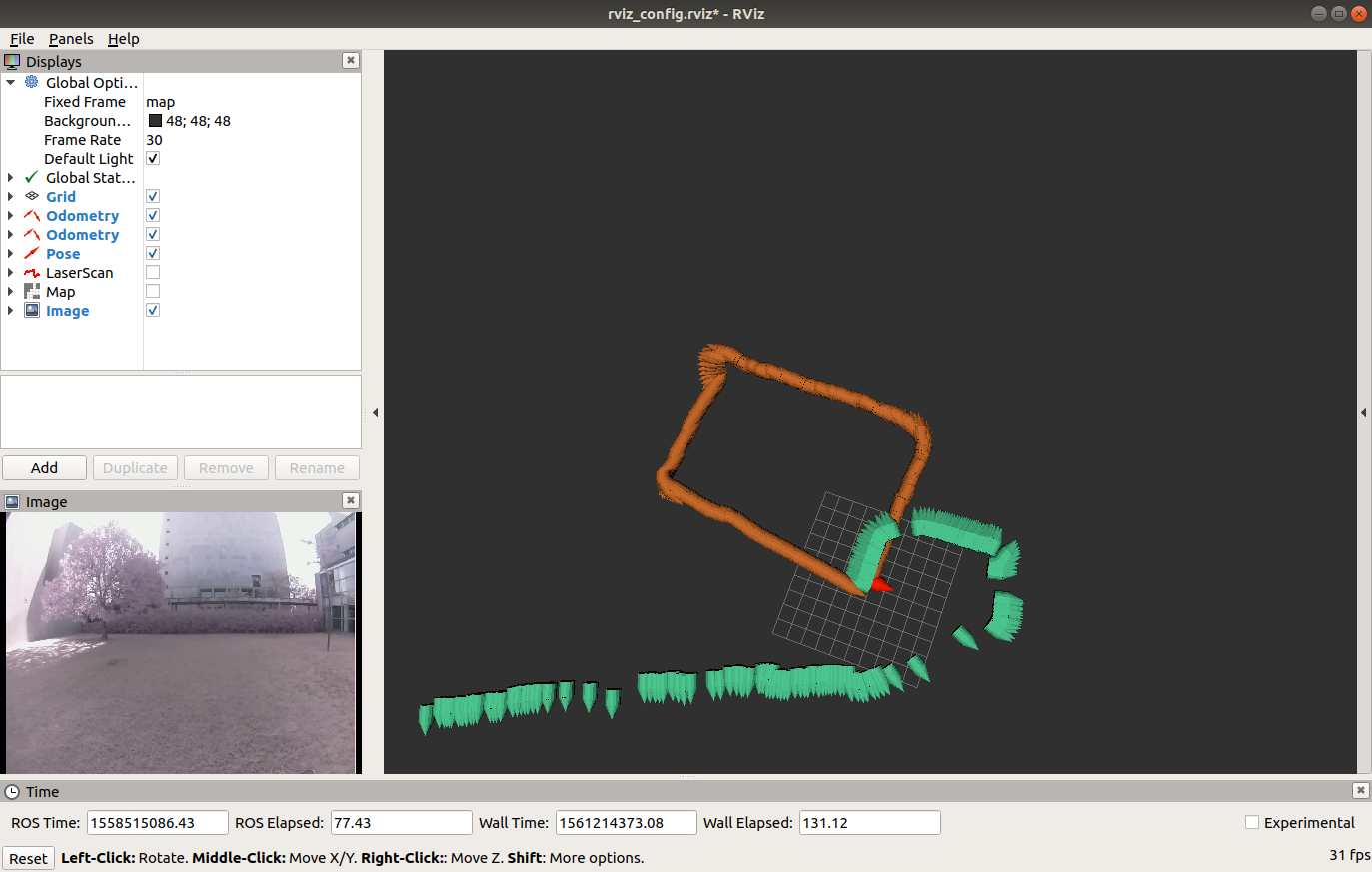
Question 2: when I used performance_test.bag and ran "roslaunch viso2_ros perspective_version.launch", position and attitude from topic "/mono_odometer/odometry" have big drift, as the green trajectory of below picture.
Thanks for you help in advance.